

Produkt- konfigurator


Durch die SEMI-Automation ist es dem Anwender durch seine Wahrnehmung möglich, aktiv in den Arbeitsablauf einzugreifen und manuelle Prozessschritte bei Bedarf einzuleiten. Komplexe Teilprozesse dagegen können durch fest hinterlegte Bewegungsabläufe vollautomatisiert ausgeführt werden. Sofortige sowie flüssige und genaue Bewegungen erlauben hohe Taktzeiten unter perfekter Kontrolle des Anwenders.
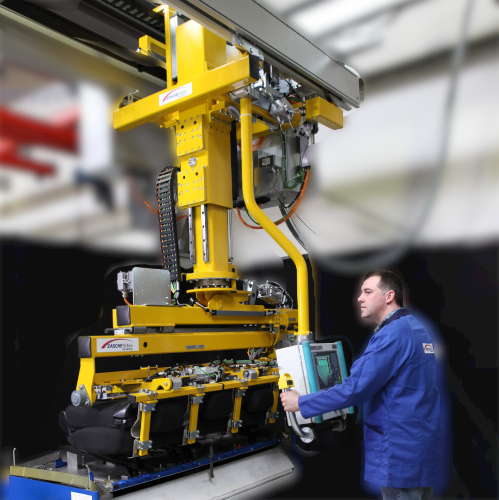
Die Bauform des Handlingsgerätes sowie ergonomisch angeordnete Bedienelemente ermöglichen es dem Anwender, das Gerät sowohl im Automatikmodus als auch manuell zu bedienen.


Schreiben Sie uns eine E-Mail oder rufen Sie uns an – wir vereinbaren gerne einen Beratungstermin mit Ihnen.
Gerne können Sie auch vorab unsere Broschüre herunterladen.
Wahlweise kann die Bedienung direkt am Gerät oder über ein drahtloses Hand-Held erfolgen. Mit allen nötigen Funktionen und Anzeige aller Betriebsparameter bleiben Sie immer Herr der Lage.
Als Systemlieferant können wir Ihnen die Komplettlösung – vom Stahlbau beginnend bis zur Inbetriebnahme – für Ihre Anwendung anbieten.
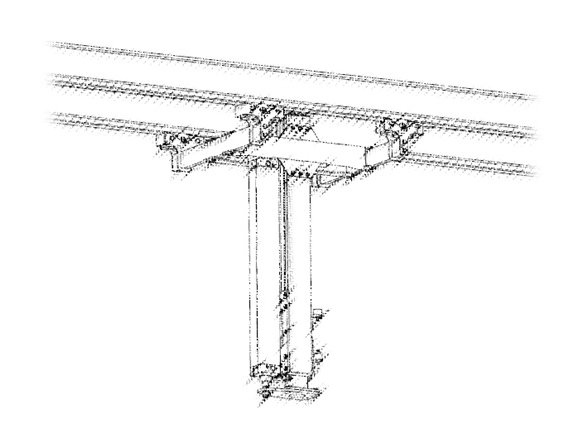
Um Arbeitsbereiche weit über denen eines klassischen Industrie-Roboters abzudecken, werden standardisierte und erprobte Komponenten aus der Krantechnik herangezogen.
Je nach Anforderung an Kraft und Beschleunigung werden frequenzgesteuerte oder Servo-Antriebe verwendet.
Durch den Datenaustausch mit externen Programmen können z. B. Behälterpositionen automatisiert angefahren oder Greifereinstellungen ohne Zeitverlust und mit hoher Prozesssicherheit vorgenommen werden. Weiter können verschiedene Daten wie z. B. QR- und Barcodes ausgelesen und direkt zur Weiterverarbeitung an andere Empfänger übermittelt werden.
Ein anwendungsspezifisches Längenmesssystem stellt sicher, dass die Position der Anlage im Arbeitsbereich erfasst wird.
Der vertikale Hub kann elektrisch sowie bei besonders feinfühligen Anwendungen pneumatisch ausgeführt werden.
Bewegungen in allen drei Achsen werden durch kleine kompakte Aktuatoren ausgeführt.
Die meist individuelle Konstruktion des Greifers ermöglicht es dem Mitarbeiter, die Bauteile automatisiert oder in Mensch-Roboter-Kollaboration aufzunehmen.
Die Datenübermittlung zum Mensch-Maschine-Interface kann drahtlos erfolgen. Je nach Bedienkonzept entfällt eine zentrale Steuerungseinheit, sodass die komplette Parametrierung der Anlage am Hand-Held oder am Gerät erfolgt. Mittels Anbindung an das Internet können weitere Informationen über den Prozess oder den Status der Anlage problemlos via Fernwartung abgerufen oder beeinflusst werden.
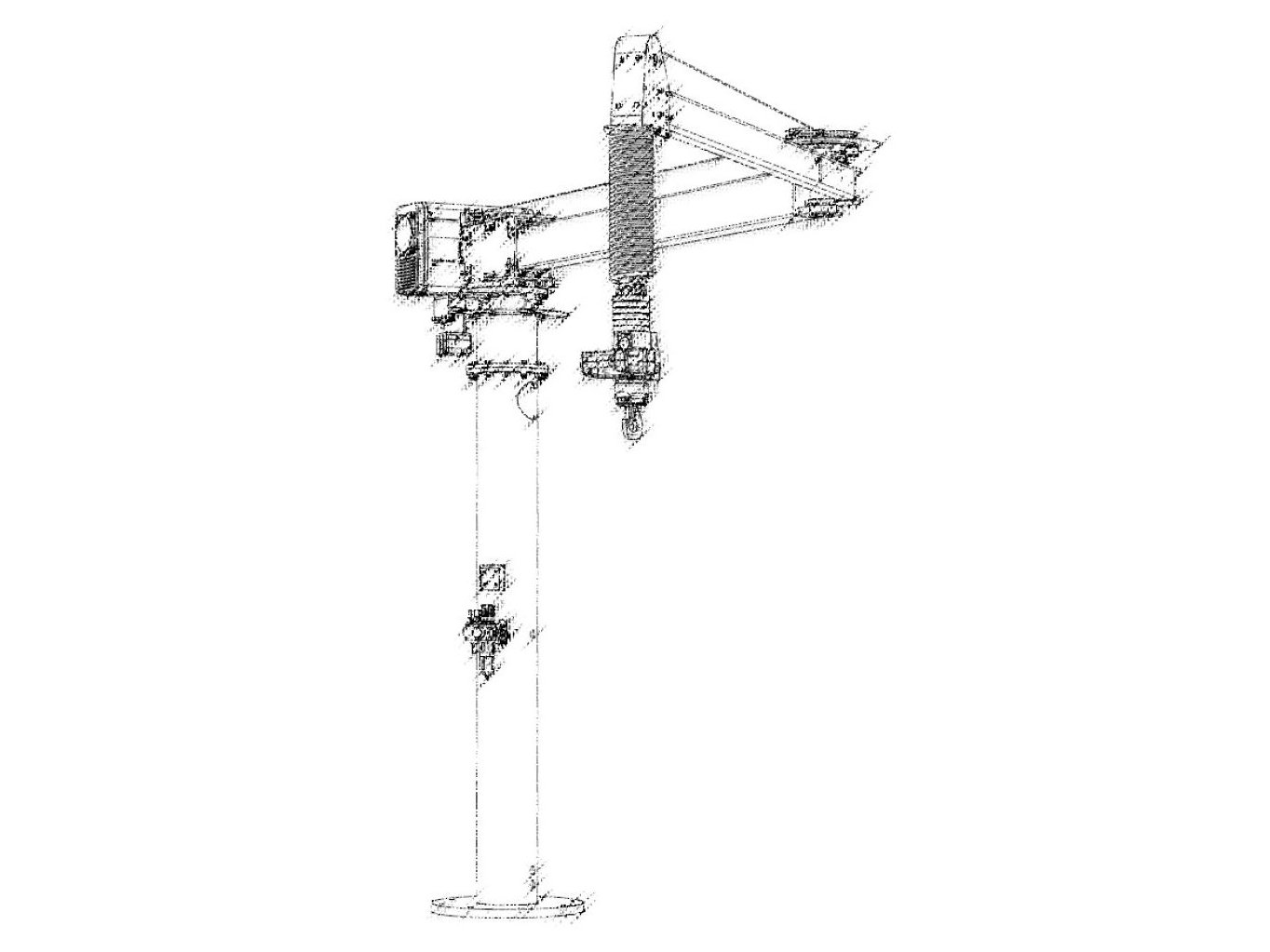
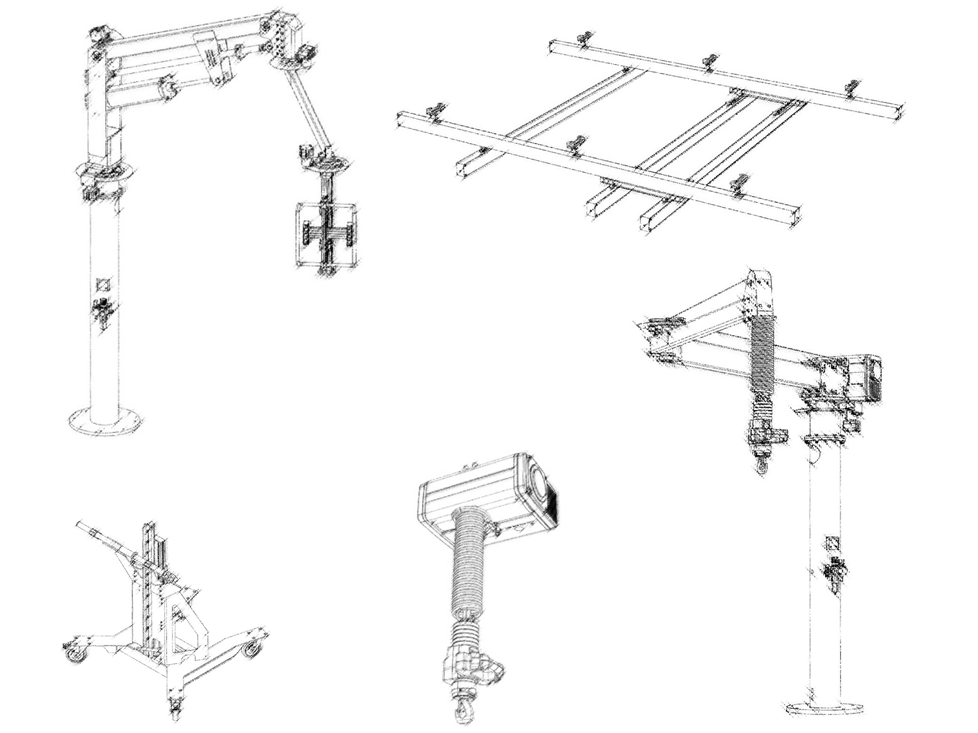
Diese Knickgelenkausleger werden mit Seilbalancern kombiniert. Durch die Montage des Hebezeugs an der Säule wird ein äußerst komfortables ...

Unsere Parallelogrammgeräte kombinieren ein pneumatisches Hubwerk mit einem Parallelogramm. Diese Technik ermöglicht die ...
Hubachsen werden in der Regel pneumatisch angetrieben und führen einen linearen Hub aus. Sie dienen zur starren, exzentrischen ...