

Produkt- konfigurator
Industriemanipulatoren sind unverzichtbare Werkzeuge zum Heben, Bewegen und Positionieren schwerer oder komplexer Komponenten. Sie verbessern die Sicherheit, reduzieren die Belastung für den Bediener und unterstützen eine höhere Produktivität in Unternehmen jeder Größe – von kleinen Herstellern bis hin zu großen Akteuren in Branchen wie der Automobilindustrie, der Druckindustrie und der Luft- und Raumfahrt. Aber wie können Sie bei der Vielzahl der verfügbaren Modelle wissen, welcher Manipulator für Ihre Aufgabe der richtige ist?
Hier gehen wir auf die wichtigsten Überlegungen bei der Auswahl eines Manipulators ein und vergleichen dabei Knickarm- und Parallelogrammsysteme – die beiden heute in der Industrie am häufigsten verwendeten Ausführungen.
Manipulatoren sind ergonomische Handhabungsgeräte, die menschliche Bediener bei Aufgaben unterstützen, die sonst übermäßige Kraftanstrengung oder ungünstige Körperhaltungen erfordern würden. Im Gegensatz zu Robotern sind Manipulatoren dafür ausgelegt, mit Menschen zusammenzuarbeiten, indem sie Kraft und Reichweite bereitstellen, während die Beurteilung und Steuerung in den Händen des Bedieners bleibt. Auf diese Weise schaffen sie ein Gleichgewicht zwischen maschineller Unterstützung und menschlicher Kontrolle: Der Bediener bleibt für die auf seinem Urteilsvermögen basierenden Bewegungen verantwortlich, während das Gerät die für eine sichere Handhabung erforderliche Kraft, Reichweite und Stabilität bereitstellt.
Dies macht Manipulatoren besonders wertvoll in Anwendungen, in denen Teile schwer sind, sich wiederholende Aufgaben ausgeführt werden müssen oder Lasten stabil und waagerecht gehalten werden müssen.
Die Auswahl des richtigen Manipulators ist selten eine eindimensionale Entscheidung. In der Praxis gibt es fünf Faktoren, die Betriebsleiter bei der richtigen Wahl leiten sollten.
Für die meisten Entscheidungsträger ist die Nutzlast der natürliche Ausgangspunkt, da jeder Manipulator nicht nur durch das Gewicht, das er tragen kann, sondern auch durch die Verteilung dieses Gewichts begrenzt ist. Je nach Anwendung können jedoch andere Überlegungen Vorrang haben.
Die Reichweite ist oft ein entscheidender Faktor in einer Einrichtung mit begrenztem Platzangebot, da die Entfernung, die ein Manipulator zurücklegen muss, häufig die Kapazität und das Layout bestimmt. Ein Arm mit kurzer Reichweite bietet zwar eine höhere Nutzlast, ist jedoch möglicherweise nicht geeignet, um mehrere Arbeitsstationen oder große Paletten zu überspannen. Allerdings ist es möglich, Manipulatoren in Kransysteme zu integrieren, um die Reichweite zu vergrößern.
Die Ausrichtung der Last ist entscheidend, wenn das Teil waagerecht oder ausgerichtet bleiben muss. Behälter mit Flüssigkeiten dürfen beispielsweise nicht gekippt werden, da sonst die Gefahr des Auslaufens besteht, während empfindliche Elektronikgeräte aufrecht stehen müssen, um Beschädigungen zu vermeiden. In anderen Fällen kann die Möglichkeit, eine Platte oder Welle in die richtige Position zu drehen, genauso wichtig sein wie das Anheben selbst.
Ergonomie und Sicherheit sorgen dafür, dass der Bediener effizient und ohne Belastung arbeiten kann. Reibungslose, intuitive Bewegungen reduzieren die Ermüdung während einer Schicht und verringern das Risiko von Muskel-Skelett-Verletzungen – Vorteile, die sich in einer höheren Produktivität niederschlagen.
Und schließlich setzt auch die Umgebung oft strenge Grenzen. Hohe Temperaturen, Staub oder explosive Atmosphären erfordern robuste, spezielle Konstruktionen, während sensible Umgebungen wie Reinräume Schutzabdeckungen erfordern, um einen kontrollierten, kontaminationsfreien Arbeitsbereich zu gewährleisten.
Zusammen bilden diese fünf Faktoren den Rahmen für die Bewertung jedes Manipulators und helfen dabei, die Auswahl auf die Konstruktionen einzugrenzen, die für die jeweilige Aufgabe am besten geeignet sind.
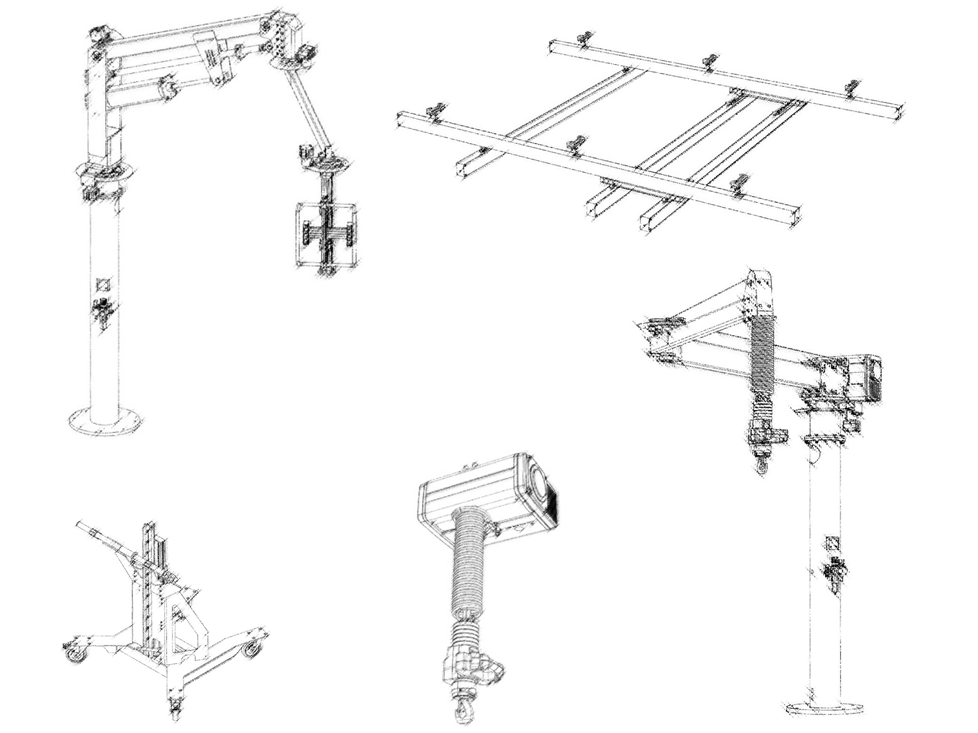
Wenn die Entscheidung zwischen Knickarm- und Parallelogrammmanipulatoren getroffen werden muss, kommt es darauf an, wie jedes Design auf dieselben Faktoren reagiert. Knickarm-Manipulatoren sind flexible, mehrgelenkige Vorrichtungen, die sich gut für klassische Pick-and-Place-Anwendungen eignen, insbesondere wenn die Last an ihrem Schwerpunkt gegriffen werden kann. Sie sind in engeren Räumen von Vorteil und eignen sich gut für mittlere Lasten, obwohl die Kapazität mit zunehmender Reichweite abnimmt.
Parallelogramm-Manipulatoren hingegen sind auf Steifigkeit und Stabilität ausgelegt. Sie eignen sich hervorragend für die Handhabung schwererer Teile, seitliche Aufnahmen oder Aufgaben, bei denen Drehmomente entstehen. Da sie Lasten aufrecht und stabil halten, werden sie häufig für Anwendungen bevorzugt, die eine präzise Ausrichtung erfordern – wie beispielsweise das Verbinden von Bauteilen oder das Positionieren großer Baugruppen.
Die folgende Vergleichstabelle fasst zusammen, wie diese beiden Typen in den wichtigsten Kriterien abschneiden.
| Knickarm | Parallelogramm | |
| Traglast | Für mittlere Lasten (<=100kg); Je länger der Arm, desto geringer die Traglast | Stärker für schwere Lasten; Stabil für Drehmomente |
| Reichweite/Flexibilität | Sehr flexibel;Gut auf engen oder abwechslungsreichen Arbeitsabläufen | Steifer; Eher für gleichbleibende wiederholende Aufgaben |
| Belastungsausrichtung | Erlaubt Rotation um die Seilachse und einfaches umsetzen/montieren | Kann Drehmomente aufnehmen; Erlaubt außermittige Aufnahmen |
| Ergonomie | Einfach handzuhaben; Gut für abwechslungsreiche Arbeitsabläufe | Reduziert die Belastung bei Handhabung mit Drehmoment |
Diese Unterschiede zeigen, dass der richtige Manipulator immer von der Anwendung bestimmt wird. Wenn Agilität und effiziente Bewegung für die Aufnahme aus der Mitte im Vordergrund stehen, sind Gelenkarm-Manipulatoren oft die beste Wahl. Wenn es um Drehmomentwiderstand, schwere Lasten oder strenge Lastausrichtung geht, bietet ein Parallelogramm-Manipulator mehr Kontrolle und Sicherheit.
Auch Platz- und Befestigungsmöglichkeiten beeinflussen die Entscheidung. Ein am Boden bzw. an einer Säule befestigter Manipulator ist in der Regel die wirtschaftlichste Lösung, während kran- oder hängende Systeme es einem Bediener ermöglichen, mehrere Stationen oder größere Arbeitsbereiche abzudecken. Diese praktischen Überlegungen bestimmen in Kombination mit den grundlegenden Faktoren Nutzlast, Reichweite und Ergonomie, welches Design die beste Balance bietet.
Jede Entscheidung bringt Kompromisse mit sich. Eine größere Reichweite verringert die Nutzlastkapazität, Flexibilität ist mit höheren Kosten verbunden als bei festen Systemen, und Effizienz muss immer gegen die Sicherheit des Bedieners abgewogen werden. Das Ziel ist nicht, eine universelle Lösung zu finden, sondern einen Manipulator zu spezifizieren, der auf die Anforderungen Ihres Prozesses zugeschnitten ist.
Die Auswahl eines Manipulators mag komplex erscheinen, aber sobald die Kernfaktoren klar sind – Nutzlast, Reichweite, Lastorientierung, Ergonomie und Umgebung – wird die Entscheidung viel einfacher. Der Vergleich zwischen Gelenk- und Parallelogrammmanipulatoren zeigt, dass jedes Design in unterschiedlichen Bereichen seine Stärken hat und die richtige Wahl immer vom Kontext abhängt.
Letztendlich geht es bei Manipulatoren nicht nur um das Heben – sie sollen Menschen ermöglichen, sicherer, präziser und nachhaltiger zu arbeiten. Die besten Ergebnisse werden erzielt, wenn das Design der Geräte mit langjähriger Erfahrung und Unterstützung einhergeht, damit diese Systeme auch weiterhin den sich wandelnden Anforderungen in der Fertigung gerecht werden.