

Product configurator
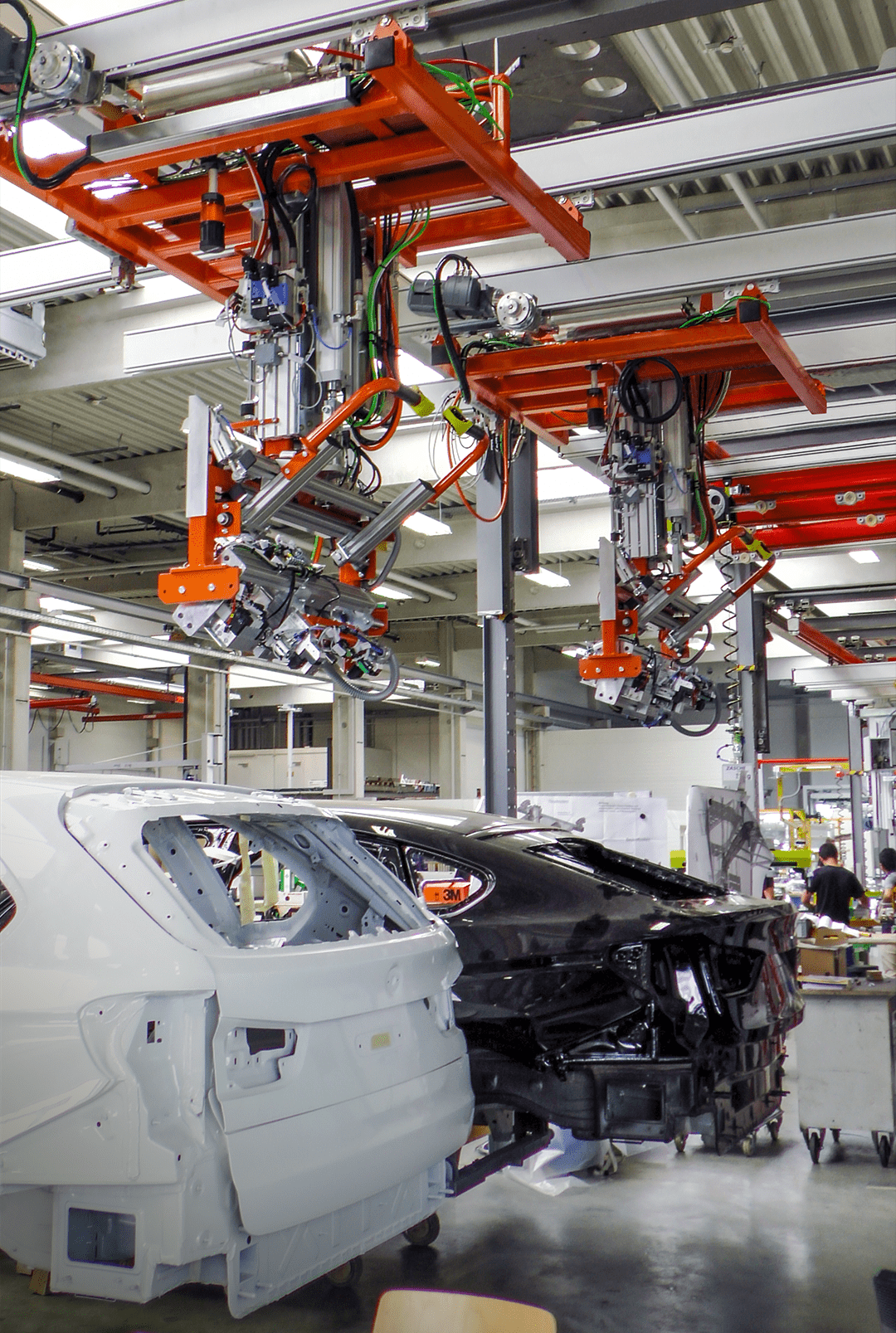
The coexistence between the operator and the handling device lets non-productive times be used more productively or several stations can operated simultaneously, depending on the workflow.
This means that the operator continues to cover the tasks that cannot be automated. Be it
a complex or imprecise placement of the workpieces, or a work process where the operator’s cognitive skills are irreplaceable. These tasks will be carried out in manual mode.
Tasks, however, that include long travel distances or part placement in defined positions, for example, will be done in automatic mode.
The process time that is, for example, used for the handling device’s movement to the placement destination, releasing the part and returning to pick up the next workpiece can be either used for different tasks by the operator or to operate multiple stations simultaneously, depending on the overall cycle time.
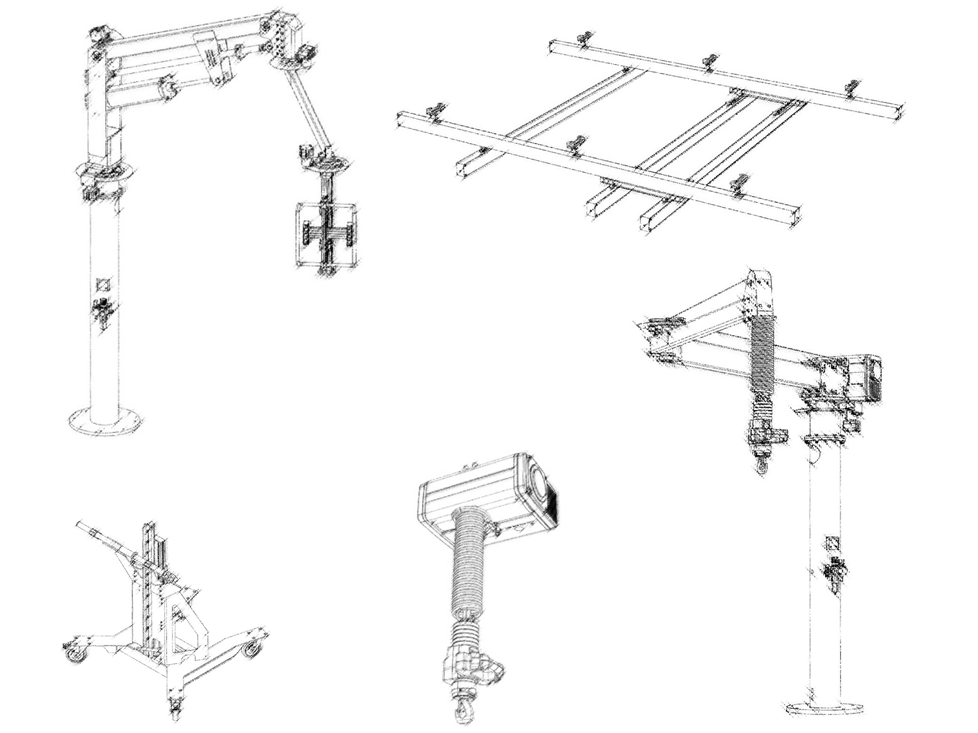
An ergonomic lifting aid for machine operators, our articulated arms are combined with rope balancers and can be anchored to pillars, columns…

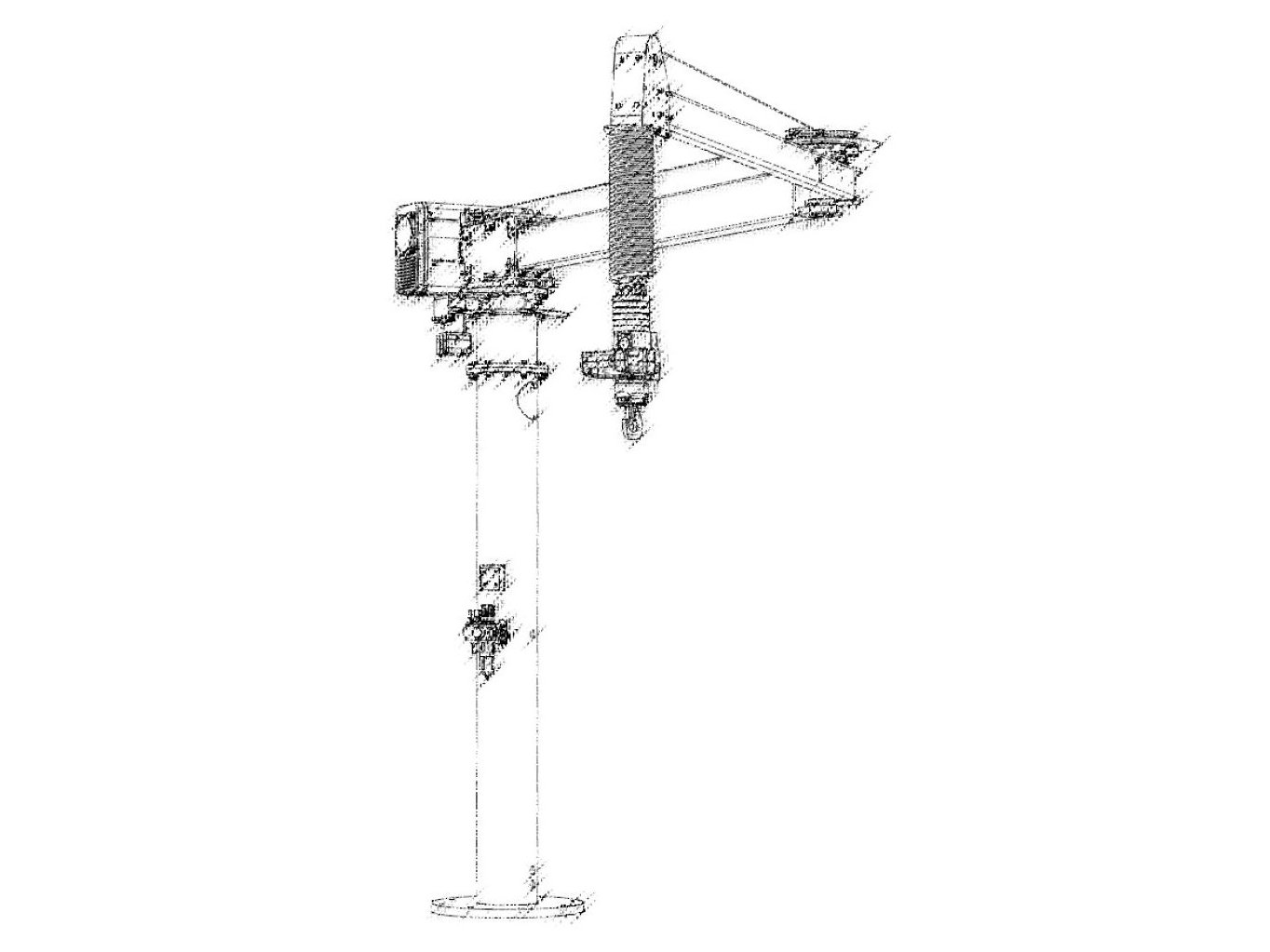
A combination of pneumatic hoists with parallelograms, our parallelogram manipulator range is a gravity-defying solution that enables the equalization…

Available as overhead or floor-mounted systems, our stacker cranes may be used to reach off-centered pick-up positions and to perform large strokes…